Q&A Forum
I converted a dynojet 248 to yourdyno electronics. I have been using it successfully for about 6 months. I have one problem I can't seem to figure out.
I have three optional methods to receive engine speed signal (OBD2 w/ elm adapter, CAN adapter and optical sensor wired into RPM2). All speed sensors work correctly and display properly in yourdyno software.
For an ineria dyno, HP is derived from drum speed change and torque is calculated using engine rpm. How do I get torque to be calculated using any of the optional sensors?
I don't know how to enclose a picture so I'll link to it.
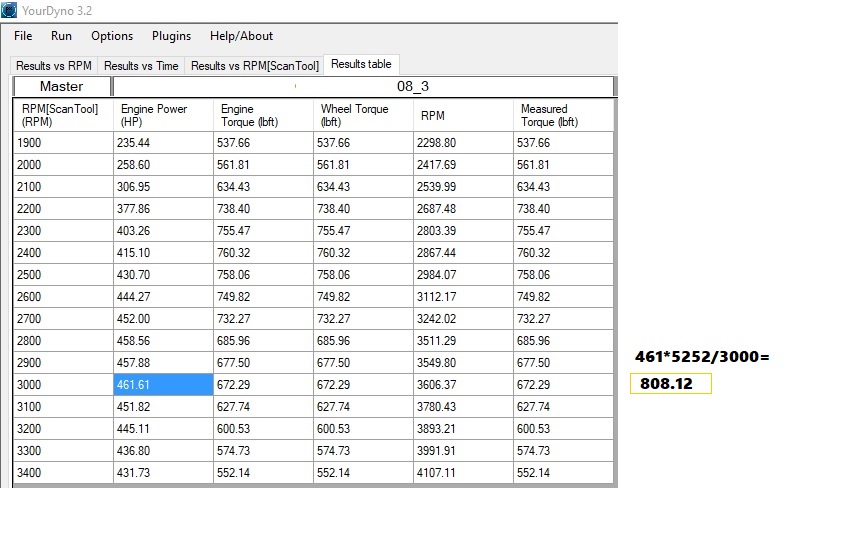
Here I've made a pull with Scantool OBD2 RPM sensor recording. I've selected "results" page and made Scantool(RPM) master.
Look at the 3000 RPM range. This is how I feel torque should be calculated and what I want graphed.
In this example all torque calculations are derived using theoretical rpm (tacho drum rpm x ratio ) not actual measured RPM. Torque calculations are incorrect as a result.
Changing engine speed setting from tacho to "Scantool(RPM)" doesn't make any difference.
Thanks for the help!
-Chris
Hi,
Power and Torque are calculated at the roller. Engine Torque is calculated from roller torque divided by gear ratio. If you have a difference between the Engine RPM (Roller RPM * Gear ratio) and a direct Engine RPM measurement, then you should rather work to fix that. For example you can set the gear ratio with the brake on to make sure everything is loaded up when the gear ratio is calculated. In particular tires compress under load and gear ratio can change, so setting gear ratio under load helps. Also ensure running high tire pressure.
You could make a math channel that recalculates the measured torque to the directly measured engine RPM. OBD2 is slow so the results will be jumpy, but CAN bus or RPM2 are fast so that will work. You will not be able to do the coast down compensation since this is calculated after the run is complete based on roller RPM so a math channel cannot be used, but for Wheel Torque and Measured Torque is will work.
Thank you for the reply. I ran a DynoJet software package for about 15 year before converting to YourDyno. By comparison, the Dynojet torque value is ONLY based on external RPM option. Without RPM signal only HP can be measured because it makes no assumption about engine rpm. If you lose RPM signal during pull, torque goes to infinity or 2500ft-lbs(max value) in my case.
I enjoy the simplicity of the YourDyno tacho feature for the non-slipping clutches and Lockup style torque converters. But it also has limitations.
Torque converter slip (non-lockup) is dependent on engine torque so it varies during a pull and with engine rpm/boost/ etc. Applying the brakes under power and trying to set a static ratio gear ratio is not a way to get truly accurate numbers. Another example big tires grow with speed. With YourDyno, do I lock in the ratio at max tire rpm and have incorrect torque at low/mid rpm or lock the ratio at small tire height and have incorrect torque at full speed? As more CVT transmissions come out that method doesn't work for those either. When we get away from locking the gear ratio we can actually graph gear ratio vs engine rpm and quantify these errors.
The torque based on an external RPM feature does work in all those situations and provides accurate data. I love the software and the work you've done. I feel it would be far better if this were an option. I'm sure more people in the future are going to continue to ask for it.
For now, I'll research math channels and see what I can come up with.
Thanks again,
Chris
@cstrick9 your points are correct.
You can use the direct engine RPM channel as your X-axis (Options->Results vs XXX) and with a Math channel you create an Engine torque reading based on that RPM reading (Torque2 = Torque * RPM / Direct Engine RPM).
I agree it is possible to make it an option to automatically use the direct engine RPM in cases where you have a fast and reliable RPM reading. But a spark plug wire pickup is not always reliable, and OBD2 is slow, so it is only for CAN bus or when you have a "proper" engine RPM sensor that it will as good as using the Roller RPM. So at least it should not be the default.
I created a math channel called "True Torque" and I used OBD2 for testing just to see how bad it is. I set drum based Engine rpm with about 600 rpm of error just for testing a made a pull.
Here is my graph of Results vs RPM(Scantool)
So the "True Torque" variable is calculated and displayed correctly like I want. I'm using an OBDlink MX+ professional and it appears to update plenty fast for good results.
The next issue is "Max Wheel Power" and "Max Wheel Torque" are incorrect. They are still based on estimated RPM. I placed the pointer on the HP graph @ 3180RPM and the graph is 327HP but the "Max Wheel Power" at the bottom is claiming 352HP @ 3180 RPM. Also "True Torque" is over 700 but the "Max Wheel Torque" shows 651.
I love having the max HP and torque listed at the bottom of the printout. I can obviously turn this off before printing for the customer since it is incorrect, but would there be a way to display the proper values based on the current graph?
Thanks for everything.
-Chris